crane
The landice/crane test group includes a test case for creating a
mesh for Crane Glacier, Antarctica. The optimization for basal friction
happens outside of COMPASS because it requires expert usage and takes a
larger amount of computing resources than COMPASS is typically run with.
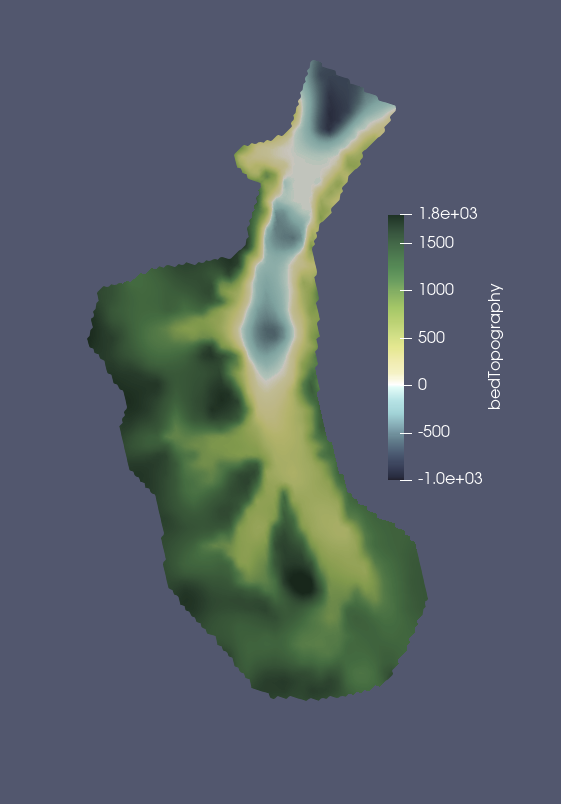
Bed topography in meters above sea level on Crane 500m-1km mesh.
The test group includes a single test case that creates the variable resolution mesh.
config options
The test group uses the following default config options. At this point only the mesh generation options are adjusted through the config file.
# config options for mesh_gen test case
[mesh]
# number of levels in the mesh
levels = 10
# Bounds of Crane regional mesh
x_min = -2.442e6
x_max = -2.246e6
y_min = 1.124e6
y_max = 1.334e6
# distance from ice margin to cull (km).
# Set to a value <= 0 if you do not want
# to cull based on distance from margin.
cull_distance = -1.0
# mesh density parameters
# minimum cell spacing (meters)
min_spac = 5.e2
# maximum cell spacing (meters)
max_spac = 1.e3
# log10 of max speed for cell spacing
high_log_speed = 2.5
# log10 of min speed for cell spacing
low_log_speed = 0.75
# distance at which cell spacing = max_spac
high_dist = 1.e5
# distance within which cell spacing = min_spac
low_dist = 5.e4
# mesh density parameters used if use_bed = True
# These settings are taken from the Humboldt mesh
# and have not yet been evaluated for Crane.
# distance at which bed topography has no effect
high_dist_bed = 1.e5
# distance within which bed topography has maximum effect
low_dist_bed = 5.e4
# Bed elev beneath which cell spacing is minimized
low_bed = 50.0
# Bed elev above which cell spacing is maximized
high_bed = 100.0
# mesh density functions
use_speed = True
use_dist_to_grounding_line = True
use_dist_to_edge = False
use_bed = False
# Whether to interpolate data (controls run_optional_interpolation)
interpolate_data = False
# path to directory containing BedMachine and Measures datasets
# (default value is for Perlmutter)
data_path = /global/cfs/cdirs/fanssie/standard_datasets/AIS_datasets
# filename of the BedMachine thickness and bedTopography dataset
# (default value is for Perlmutter)
bedmachine_filename = BedMachineAntarctica_2020-07-15_v02_edits_floodFill_extrap_fillVostok.nc
# filename of the MEASURES ice velocity dataset
# (default value is for Perlmutter)
measures_filename = antarctica_ice_velocity_450m_v2_edits_extrap.nc
# projection of the source datasets, according to the dictionary keys
# create_scrip_file_from_planar_rectangular_grid from MPAS_Tools
src_proj = ais-bedmap2
# number of processors to use for ESMF_RegridWeightGen
nProcs = 128
mesh_gen
landice/crane/default creates a variable resolution mesh.
The default is 500m-1km resolution with mesh density determined by
observed ice speed and distance to grounding line. There is no model
integration step.
If optional BedMachine and/or MEaSUREs datasets are configured, they are
subset to the mesh bounding box from [mesh] before SCRIP generation and
conservative remapping to reduce memory and runtime.
The base-mesh projection used in build_mali_mesh() is fixed for this test
case.